Robótica
Podemos definir el termino robótica como:
La ciencia que estudia el desarrollo y diseño de maquinas capaces de hacer tareas que los seres humanos generalmente llevamos a cabo.La robótica combina diversas ciencias para su aplicación como son: la electronica, informática, la fisíca, la inteligencia artificial y la ingenieria de control.
Historia de la Robótica
Podemos situar el inicio de la robótica moderna a partir del siglo XVII con la industria textil cuando Joseph Jacquard inventa en 1801 una máquina textil programada mediante tarjetas perforadas. Con la revolución industrial se impulsaron estos avances mecánicos, después de esta revolución se comenzarón a crear máquinas capaces de realizar diversas actividades en la industria. La palabra
"robot" fue utilizada por primera vez en 1920 en una obra
llamada "Los Robots Universales de Rossum", escrita por el dramaturgo
checo Karel Capek. La palabra checa 'Robota' significa servidumbre palabra
que cuando se tradujo al ingles se convirtió en el término robot. En 1939 Issac Ismov comenzó a
hacer contribuciones relacionadas con los robots, a él se le atribuye el
acuñamiento del término "Robótica" y con esto surgen las tres leyes
de la robótica, dichos preceptos establecen que:
- Primera ley: Un robot no puede actuar contra un ser humano o, mediante innación, que un ser humano sufra daños.
- Segunda ley: Un robot debe obedecer las ordenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley
- Tercera ley: un robot debe proteger su propia existencia, a no ser de que este en conflicto con las dos primeras leyes.
Tipos de robots
Dependiendo de su uso y aplicación los podremos divir en:
 Robots industriales: Fuerón creados con el fin de acelerar la producción en las industrias y mejorar la calidad de los materiales, son utilizados para fabricar cualquier tipo de productos industriales.
Robots industriales: Fuerón creados con el fin de acelerar la producción en las industrias y mejorar la calidad de los materiales, son utilizados para fabricar cualquier tipo de productos industriales.- Androides: Son aquellos que parecen y actúan como humanos.
- Moviles: Estos tienen ruedas que les permiten moverse y tienen una programación definida para realizar cierto tipo de actividades,son utilizados usualmente para transportar materiales o para la exploración espacial.
- Médicos: Se consideran robots médicos a las prótesis ya que estas permiten igualar los movimientos y funciones de los órganos a los que sustituyen.
- Zoomorfícos: Estos son capaces de imitar a diversos seres vivos.

Clasificación a partir de su cronología:
Esta clasificación se hace a partir de las generaciones de robots y sus avances.
- Primera generación: robots manipuladores consisten en sistemas mecánicos con sistemas sencillos que realizan funciones que nosotros hacemos de forma manual.
- Segunda generación: robots de aprendizaje repiten movimientos que han sido ejecutados por un humano previamente. Estos movimientos se realizan gracias a un operador y el robot memoriza dichos movimientos.
- Tercera generación: robots con sensores son controlados por una computadora a partir de un programa en el cual se integran las ordenes y movimientos necesarios que el robot debe de seguir.
- Cuarta generación: robots inteligentes funcionan igual que los anteriores, pero difieren en que estos pueden mandar informacion a la computadora sobre el estado de algún proceso.
Leyes de la robótica
Aplicaciones:
Los robots se aplican en sectores como:
- Agricultura y silvicultura.
- Ayuda a discapacitados.
- Construcción.
- Domésticos.
- Entornos peligrosos.
- Medicina.
- Minería.
- Sistemas de seguridad.
- Espacio.
La aplicación de la robótica en estos sectores se caracteriza por la falta de estructuración tanto del entorno como de la tarea a realizar, realizan trabajos en entornos peligrosos en los que no es posible o implica riesgos el acceso de personas.
Estas características requieren que los robots tengan un mayor grado de inteligencia; es decir, utilizan herramientas como sensores de movimiento y un software para la toma de decisiones .
Aplicación en la Industria Nuclear.
 Son robots con un diseño especifico que se emplean de realizar operaciones de mantenimiento en zonas contaminadas que requieren la manipulación de residuos.
Son robots con un diseño especifico que se emplean de realizar operaciones de mantenimiento en zonas contaminadas que requieren la manipulación de residuos.
Generalmente son utilizados para dar mantenimiento a los reactores nucleares. Así como los robots nucleares que se encargan de la labor de manejar los desechos industriales, de baja contaminación (vestimentas, envases, papel, etc.) ó de alta contaminación ( restos de células del reactor, materiales en contacto con radiaciones, etc.
Aplicación en la Construcción
Este sector requiere de robots capaces de poder manejar piezas pesadas y de grandes dimensiones, requieren de un cierto grado de inteligencia, una alta capacidad de locomoción y deben ser fáciles de transportar. Se utilizan en la construcción de edificios prácticamente de cualquier tipo llevan a cabo acciones como el posicionamiento de piezas, la unión de estas, acabados, recubrimiento de superficies con pintura o barniz y la excavación.
Estructura básica de un robot
Se divide en tres partes principales:
- Manipulador
- Control
-Sistemas sensitivos
Manipulador: Es la parte mecánica del robot y esta formada por un conjunto de elementos relacionados entre sí llamados uniones que le permiten realizar movimientos de rotación.
A estas uniones se les llama pares cinemáticos y le permiten al robot hacer tres movimientos rotación, traslación y notación.
 También dentro de la manipulación encontramos a los dispositivos de agarre y sujeción que serían las manos. Y a los sistemas motores que proporcionan energía mecánica que se transmite directamente o a través de elementos auxiliares.
También dentro de la manipulación encontramos a los dispositivos de agarre y sujeción que serían las manos. Y a los sistemas motores que proporcionan energía mecánica que se transmite directamente o a través de elementos auxiliares.
Control: Se emplea para manejar los motores.
Sistemas sensitivos: Permiten la interacción del robot con su entorno, pueden ser de dos tipos de contacto directo o remotos.
Componentes principales:
Generador: Convierte la energía mecánica en energía eléctrica.
Sistemas de control: Se encargan de controlar las acciones que realizará el robot.
Terminales: Que vienen siendo las manos mecánicas, estos elementos dependiendo de su uso tienen una clasificación.
Sensores: Los sensores que emplean los robos son, sensores de acercamiento y proximidad, de velocidad y aceleración, fuerzas y pares, dimensiones y sensores de temperatura presión, etc.
La ciencia ficción y la Robótica
En los rodajes de ciencia ficción siempre se ha tocado el tema de la inteligencia artificial, relacionado con los temas de robótica.
 En películas como terminator podemos ver dos ejemplos claros de la inteligencia artificial (I.A). Durante la trama de esta historia encontramos la inteligencia artificial aplicada en máquinas (robots) que terminan comprendiendo los sentimientos humanos, y por otro lado tenemos a los ordenadores inteligentes que logran escapar del control humano y esto propicia una guerra entre humanos y máquinas.
En películas como terminator podemos ver dos ejemplos claros de la inteligencia artificial (I.A). Durante la trama de esta historia encontramos la inteligencia artificial aplicada en máquinas (robots) que terminan comprendiendo los sentimientos humanos, y por otro lado tenemos a los ordenadores inteligentes que logran escapar del control humano y esto propicia una guerra entre humanos y máquinas.
Por otro lado tenemos rodajes en los que el tema de la robótica se ha abordado de manera divertida como es el caso de los androides de "La Guerra de las Galaxias".
Películas como "Yo robot", "El hombre bicentenario" Y la "Inteligencia artificial (I.A)" están basadas en los textos del ya mencionado Issac Asimov.
Entre otros títulos que abordan robots en sus relatos tenemos a:
 -Robots
-Robots
-Transformers
-Gigantes de Acero
-Gigante de Hierro
- Robocop
Biónica
Historia de la Biónica
El término biónica procede de 1960 acuñado por Jack Steele, el definió esta ciencia como: " El análisis del funcionamiento real de los sistemas vivos, y una vez descubiertos los trucos, materializarlos en aparatos".
La biónica le ha brindado al hombre la capacidad de adaptarse a la naturaleza, de observarla y analizarla para luego crear soluciones estéticas, innovadoras y funcionales cada vez mas cercanas a la perfección.
El primer registro de la biónica data del 300 a.c que consiste en un prótesis de madera y cobre que fue hallada en Italia.
En el siglo XV comenzó el auge de aplicaciones de la biónica. Leonardo da Vinci basó muchos de sus estudios en entender el vuelo de las aves, luego creo inventos que le permitirían a los humanos volar. Las creaciones de da Vinci no terminan ahí, también utilizó y analizo el régimen turbulento de los canales de irrigación para generar sistemas de mantenimiento que fueron utilizados durante 5 siglos.
En el siglo XIX se empezó a emplear la biónica en la medicina con prótesis, anteojos, entre otros. La biónica parte principalmente de la observación de la naturaleza para crear artefactos que cumplan la misma función de manera artificial.
Concepto de Biónica
Es la rama de la cibernética que trata de simular el comportamiento de los seres vivos haciéndolos mejores en casi tosas las ramas por medio de instrumentos mecánicos.
La palabra biónica viene del griego "bios" que significa vida y el sufijo "-ico" que significa "relavito a!.
Es la aplicación de soluciones biológicas a la técnica de los sistemas de arquitectura, ingeniería y tecnología moderna.
Ingeniería Biónica
Esta ingeniería abarca varias disciplinas con el objetivos de conectar sistemas bilógicos y electrónicos, por ejemplo para crear prótesis activadas por los nervios, robots controlados por una señal biológica, o también crear modelos artificiales de elementos que solo se encuentran en la naturaleza, por ejemplo la inteligencia artificial.
Campos de Aplicación
Medicina: En este campo la biónica significa la sustitución de órganos o miembros por versiones mecánicas. La diferencia de estos implantes con las prótesis es que estos imitan la función original del órgano.
 Audiovisual: Con la biónica se ha podido llevar a cabo la reproducción y compresión dentro del campo audiovisual teniendo en cuenta las limitaciones de los sistemas auditivo y visual humanos.
Audiovisual: Con la biónica se ha podido llevar a cabo la reproducción y compresión dentro del campo audiovisual teniendo en cuenta las limitaciones de los sistemas auditivo y visual humanos.
Diseño de productos: Es la parte de la biónica que se dedica a la parte del diseño y funcionamiento de los órganos sensoriales que se quieren reproducir.
Arquitectura Biónica: Es un movimiento para el diseño y construcción de edificios que expresan trazados y líneas tomadas de las formas naturales.
División de los sistemas biónicos
Se dividen en dos tipos:
- Sintético analógicos: Se inspiran en elementos de la naturaleza para desarrollar instrumentos que imiten cualidades de los seres vivos. Por ejemplo: el radar que fue basado en las distintas características de los animales para interactuar en su medio.
- Sintético compuestos: Combinan partes técnicas con partes vivas.
Alcance y Aplicación de la Biónica
Esta ciencia ha tenido alcance en países como Alemania, Estados Unidos e Inglaterra.
 Se han desarrollado avances de sustitución de órganos en los cuales se quiere lograr la conexión del sistema nervioso central con la del sistema músculo-esquelético con el fin de comunicar un órgano del cuerpo humano con materiales no biológicos. En países como Colombia se están desarrollando tecnologías que permitan conectar el cerebro con las estructuras artificiales que sustituirán algún órgano.
Se han desarrollado avances de sustitución de órganos en los cuales se quiere lograr la conexión del sistema nervioso central con la del sistema músculo-esquelético con el fin de comunicar un órgano del cuerpo humano con materiales no biológicos. En países como Colombia se están desarrollando tecnologías que permitan conectar el cerebro con las estructuras artificiales que sustituirán algún órgano.
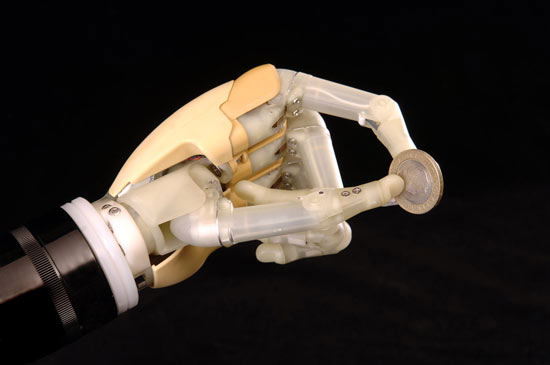
El ejemplo más reciente de la aplicación de la biónica es una prótesis para un niño de una mano artificial que le permite realizar cualquier actividad desde montar una bicicleta, hasta cortar papel con unas tijeras; esto se logra con electrodos que hacen posible la transmisión de impulsos a todas las partes de la prótesis.
Entre los implantes biónicos más conocidos de encuentran las extremidades, estos implantes intentan suplir la inexistencia de una extremidad, que a diferencia de las prótesis simples, estás ofrecen una mejor funcionalidad.
Desventajas de la Biónica
La única desventaja en la biónica es que no podrá llegar a ser perfectamente igual al cuerpo humano como tal. un ojo biónico no podrá ofrecer la calidad de visión que tenemos por naturaleza, ni tampoco se podrá lograr sensibilizar del todo a las extremidades artificiales. Pero a pesar de esto se trata de igualar en la medida de lo posible a la naturaleza.
Las dificultades a las que se enfrentan los ingenieros biónicos son principalmente el tamaño y la cantidad de las terminaciones nerviosas, para realizar esto es necesario trabajar individualmente con cada terminación nerviosa lo que requiere un trabajo con mucha precisión; por otro lado las personas con una prótesis biónica tendrán que estar sometidas a un proceso de rehabilitación.
El presupuesto requerido para lograr estos proyectos es de millones, lo que hace que sea difícil acceder de manera fácil a uno de estos artefactos.